
⊗ กติกาการแข่งขันหุ่นยนต์ขนถ่ายวัสดุ [ pdf ]
⊗ ใบสมัครแข่งขันหุ่นยนต์ขนถ่ายวัสดุ [ pdf ] [ docx ]
⊗ โปสเตอร์ประชาสัมพันธ์ขนาด A3 [ png ]
⊗ หนังสือเชิญเข้าร่วมแข่งขัน [ pdf]
⊗ กำหนดการแข่งขัน [ pdf ]

รางวัลรองชนะเลิศ อันดับที่ 1 ได้รับ เกียรติบัตรและเงินรางวัล 7,000 บาท
รางวัลรองชนะเลิศ อันดับที่ 2 ได้รับ เกียรติบัตรและเงินรางวัล 5,000 บาท
รางวัลนักประดิษฐ์ยอดเยี่ยม ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลเทคนิคยอดเยี่ยม ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลศิลปะยอดเยี่ยม ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลความคิดสร้างสรรค์ ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลขวัญใจมหาชน ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลผู้เข้าร่วมแข่งขัน ได้รับเกียรติบัตร
2. Blue Thunder (มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี)
3. เทพเกรียนโลกแตก (โรงเรียนอ่างทองปัทมโรจน์วิทยาคม)
4. วิ่งช้าแต่น่ารัก (โรงเรียนอ่างทองปัทมโรจน์วิทยาคม)
5. iGenius Robot 1 (iGenius Robot)
6. iGenius Robot 2 (iGenius Robot)
7. แดนเนรมิต (มหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี)
8. F2PM (มหาวิทยาลัยเกษตรศาสตร์ วิทยาเขตศรีราชา)
9. GT2ME (มหาวิทยาลัยเกษตรศาสตร์ วิทยาเขตศรีราชา)
10. G-modify (มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าพระนครเหนือ)
11. SM Robot โรงเรียนบางปลาม้า “สูงสุมารผดุงวิทย์”
12. iRAP_Tender (มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าพระนครเหนือ)
13. Unrobot (มหาวิทยาลัยเทคโนโลยีราชมงคลรัตนโกสินทร์ วิทยาเขตศาลายา)
14. เหนื่อยแล้วนะ (ROBOTPLAY)
15. ROBOTPLAY (ROBOTPLAY)
16. Mr.Robot (วิทยาลัยเทคนิคดอนเมือง)
17. BrianStorm (มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร วิทยาเขตพระนครเหนือ)
18. BrianStorm_transport (มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร วิทยาเขตพระนครเหนือ)
19. Unrobot G06 (มหาวิทยาลัยเทคโนโลยีราชมงคลรัตนโกสินทร์ วิทยาเขตศาลายา)
20. iGenius Robot 3 (iGenius Robot)
การแข่งขันหุ่นยนต์ขนถ่ายวัสดุ (RMUTP ROBOCON 2016)
ณ ศูนย์พณิชยการพระนคร มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร
วันอาทิตย์ที่ 17 มกราคม 2559
08.00 น. – 10.00 น. ลงทะเบียนรายงานตัว
10.00 น. – 12.00 น. อธิบายกฎกติกาและการจับฉลากแบ่งกลุ่มการแข่งขัน
13.00 น. – 15.00 น. เริ่มซ้อมสนามแข่งขันจริง
16.00 น. – 18.00 น. การแข่งขันหุ่นยนต์ รอบแบ่งกลุ่ม (บางส่วน)
18.00 น. – เป็นต้นไป เปิดสนามซ้อมให้ทุกทีมสามารถซ้อมได้ทั้งคืน
วันจันทร์ที่ 18 มกราคม 2559
08.00 น. – 09.00 น. ลงทะเบียนรายงานตัว
09.00 น. – 13.00 น. การแข่งขันหุ่นยนต์ รอบแบ่งกลุ่ม (ต่อ)
13.00 น. – 13.45 น. การแข่งขันหุ่นยนต์ รอบก่อนรองชนะเลิศ
13.45 น. – 14.30 น. การแข่งขันหุ่นยนต์ รอบรองชนะเลิศ
14.30 น. – 15.00 น. พิธีเปิดการแข่งขันหุ่นยนต์ มทร.พระนคร (RMUTP ROBOCON 2015)
15.00 น. – 15.30 น. การแข่งขันหุ่นยนต์ รอบชิงชนะเลิศอันดับ 3
15.30 น. – 16.00 น. การแข่งขันหุ่นยนต์ รอบชิงชนะเลิศอันดับ 1
16.00 น. – 17.00 น. พิธีปิด มอบรางวัล และ ถ่ายภาพหมู่ร่วมกัน
หมายเหตุ : กำหนดการแข่งขันหุ่นยนต์อาจจะมีการเปลี่ยนแปลงตามความเหมาะสม
กติกาการแข่งขันหุ่นยนต์ขนถ่ายวัสดุ
RMUTP ROBOCON 2016
จัดโดย สาขาวิชาวิศวกรรมแมคคาทรอนิกส์ คณะวิศวกรรมศาสตร์
มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร
AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA
1. ความเป็นมาการแข่งขัน
เนื่องจากมหาวิทยาลัยเทคโนโลยีราชมงคลพระนครได้จัดงาน 11 ปี RMUTP คิด(ส์)ดี ทำดี…เพื่อสังคม ซึ่งจัดขึ้นระหว่างวันที่ 18 – 20 มกราคม 2559 ณ ศูนย์พณิชยการพระนคร มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร ทางมหาวิทยาลัยฯ จึงได้สนับสนุนการให้มีการจัดกิจกรรมประกวดแข่งขันหุ่นยนต์ในระดับชาติ โดยมีวัตถุประสงค์เพื่อพัฒนาศักยภาพของนักเรียนนักศึกษาให้สามารถนำความรู้ที่ได้จากชั้นเรียนมาประยุกต์ใช้งานจริงได้ ซึ่งจะทำให้เห็นถึงความสำคัญของการเรียนการสอนในศาสตร์แห่งวิศวกรรม ซึ่งให้ความสำคัญกับพื้นฐานเทคโนโลยีและเพื่อให้นักศึกษาฝึกทักษะในการปฏิบัติงาน ตลอดจนสามารถประยุกต์ใช้ความรู้ สามารถเลือกนำเครื่องมือ อุปกรณ์ และเทคโนโลยีมาใช้ได้อย่างมีประสิทธิภาพ ซึ่งส่งผลให้เห็นคุณค่าของการนำความรู้เชิงวิศวกรรมศาสตร์มาประยุกต์ใช้ให้ดียิ่งขึ้น และให้ความสำคัญกับการพัฒนาการคิดสร้างสรรค์ และการออกแบบเทคโนโลยีการนำความรู้เกี่ยวกับแมคคานิกส์ อิเล็กทรอนิกส์ ทางกลศาสตร์ และเทคโนโลยีคอมพิวเตอร์มาบูรณาการกับสาระวิทยาศาสตร์ คณิตศาสตร์ ศิลปะ และสาระวิชาอื่นๆ อีกมากมาย โดยการจัดการแข่งขันในครั้งนี้ทางสาขาวิชาวิศวกรรมแมคคาทรอนิกส์ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร ได้ทำการจัดการแข่งขันหุ่นยนต์ภายใต้ชื่อ “RMUTP ROBOCON 2016” โดยแนวคิดของการแข่งขันจะเป็นการจำลองระบบขนถ่ายวัสดุแบบอัตโนมัติ โดยใช้รถขนถ่ายวัสดุอัตโนมัติ (Automated Guided Vehicles) ในอุตสาหกรรม โดยหุ่นยนต์จะต้องเคลื่อนที่ไปหยิบและนำชิ้นงาน (สินค้า) ไปวางในจุดต่างๆ ที่กำหนด
ผู้เข้าแข่งขัน : แต่ละทีมมีสมาชิกไม่เกิน 4 คน ไม่รวมอาจารย์ที่ปรึกษา
คุณสมบัติผู้เข้าแข่งขัน : เป็นนักศึกษาซึ่งกำลังศึกษาอยู่ในระดับอุดมศึกษา และระดับอาชีวะศึกษา
กำหนดและสถานที่จัดการแข่งขัน : การแข่งขันหุ่นยนต์ RMUTP ROBOCON 2016 โดยจัดขึ้นระหว่างวันที่ 17 – 18 มกราคม 2559 ณ ศูนย์พณิชยการพระนคร มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร
2. รูปแบบและกติกาการแข่งขัน
การแข่งขันจะแบ่งผู้เล่นออกเป็นสองฝ่ายคือ ทีมสีเขียว และ ทีมสีน้ำเงิน โดยที่แต่ล่ะฝ่ายจะมีหุ่นยนต์ 2 ตัว ได้แก่ หุ่นยนต์บังคับด้วยมือ (Manual Robot) และ หุ่นยนต์อัตโนมัติ (Automatic Robot) ซึ่งหุ่นยนต์แต่ละตัวจะมีพื้นที่ในการทำภารกิจของตนเอง โดยเมื่อเริ่มแข่งขัน ผู้เข้าร่วมแข่งขันจะต้องบังคับหุ่นยนต์บังคับด้วยมือไปหยิบกล่องชิ้นงาน (สินค้า) เพื่อนำไปส่งต่อให้กับหุ่นยนต์อัตโนมัติในบริเวณจุดส่งชิ้นงาน โดยชิ้นงานจะมีทั้งหมด 10 ชิ้นงาน แบ่งออกเป็น 4 สี คือ สีเหลือง 4 ชิ้น สีแดง 3 ชิ้น สีฟ้า 2 ชิ้น และสีม่วง 1 ชิ้น ซึ่งถูกวางอยู่ในพื้นที่คลังสินค้า (ในกรอบสี่เหลี่ยมตามตำแหน่งที่กำหนดไว้) ซึ่งแต่ละชิ้นงานแต่ละสีจะมีคะแนนที่แตกต่างกันออกไป เมื่อหุ่นยนต์บังคับด้วยมือสามารถวางชิ้นงานในจุดส่งชิ้นงานสำเร็จจะได้รับคะแนนตามสีของชิ้นงาน จากนั้นเมื่อหุ่นยนต์บังคับด้วยมือสามารถทำคะแนนแรกได้จากการวางชิ้นงานแรกในจุดส่งชิ้นงาน หุ่นยนต์อัตโนมัติจึงจะสามารถเริ่มทำภารกิจได้ ซึ่งหุ่นยนต์อัตโนมัติจะเคลื่อนที่มาหยิบชิ้นงาน ณ บริเวณจุดส่งชิ้นงานเพื่อนำไปวางยังจุดวางชิ้นงานที่กำหนด โดยในระหว่างการขนย้าย ชิ้นงานจะต้องถูกยกให้ลอยเหนือพื้นสนามไม่สัมผัสกับพื้นสนาม เมื่อหุ่นยนต์อัตโนมัติสามารถวางชิ้นงานลงบนจุดวางชิ้นงานที่กำหนด โดยการวางชิ้นงานนั้นต้องวางอยู่บนจุดวางชิ้นงาน แต่ละจุดวางชิ้นงานจะมีหมายเลขติดอยู่ โดยที่จุดหมายเลข 1, 2 และ 3 จะได้รับคะแนนจุดละ 5 คะแนน จุดวางชิ้นงานหมายเลข 4, 5 และ 6 จะได้รับคะแนนจุดละ 10 คะแนน จุดวางชิ้นงานหมายเลข 7, 8 และ 9 จะได้รับคะแนนจุดละ 15 คะแนน โดยการวางจะต้องวางให้สีของชิ้นงานตรงกับสีของจุดวางชิ้นงาน โดยสีของจุดวางชิ้นงานในการแข่งขันแต่ละครั้งจะเปลี่ยนไปตามที่โจทย์ได้กำหนดไว้ ซึ่งโจทย์การแข่งขันจะถูกกำหนดขึ้นโดยการจับฉลากของผู้เข้าแข่งขันของทั้งสองฝ่าย โดยที่โจทย์ของทั้งสองฝ่ายจะเหมือนกัน ในการแข่งขันหากหุ่นยนต์อัตโนมัติของทีมใดสามารถวางชิ้นงานสีเหลือง สีแดง และสีฟ้า ได้อย่างน้อยสีละ 1 ชิ้นงานแล้ว หุ่นยนต์บังคับด้วยมือของทีมนั้นจะสามารถไปหยิบชิ้นงานสีม่วงไปวางไว้จุดส่งต่อชิ้นงาน เพื่อส่งต่อให้หุ่นยนต์อัตโนมัติทำภารกิจบิงโกได้ โดยหากทีมที่สามารถวางชิ้นงานสีม่วงในจุดบิงโกได้จะถือว่าจบการแข่งขันและเป็นผู้ชนะ แต่ถ้าหากไม่มีฝ่ายใดสามารถวางชิ้นงานสีม่วงในจุดบิงโกได้ กรรมการจะติดสินด้วยคะแนน โดยทีมที่มีคะแนนมากกว่าจะเป็นผู้ชนะ (จุดบิงโกสามารถวางชิ้นงานสีใดก็ได้ แต่จะได้รับคะแนนและถือว่าเป็นบิงโกก็ต่อเมื่อวางชิ้นงานสีม่วงเท่านั้น และในแต่ละจุดวางชิ้นงานหากทีมใดวางชิ้นงานไปแล้วจะไม่สามารถหยิบชิ้นงานนั้นออกจากจุดวางชิ้นงานได้)
พื้นที่ทำคะแนนนี้แบ่งออกเป็น 2 ส่วนหลัก คือ
1. พื้นที่โซนทำคะแนนของหุ่นยนต์บังคับด้วยมือหรือเรียกว่าจุดส่งชิ้นงาน โดยที่มีจุดทำคะแนนทั้งหมด 4 สี คือสีเหลือง สีแดง สีฟ้า และสีม่วง ซึ่งการวางชิ้นงานแต่ละชิ้นงานจะได้รับคะแนนตามสีของชิ้นงาน โดยการวางนั้นจะต้องวางชิ้นงานให้ตรงกลับจุดส่งชิ้นงานของสีนั้นๆ หากวางผิดจุดส่งชิ้นงานจะไม่ได้คะแนน (โดยการวางชิ้นงานขอหุ่นยนต์บังคับด้วยมือนั้นหากวางชิ้นงานผิดจุดส่งชิ้นงานจะไม่ได้รับคะแนนและไม่สามารถย้ายจุดส่งชิ้นงานได้แต่หุ่นยนต์อัตโนมัติสามารถทำภารกิจต่อไปได้)
2. พื้นที่โซนทำคะแนนของหุ่นยนต์อัตโนมัติ จะอยู่ที่จุดวางชิ้นงาน ซึ่งอยู่ที่จุดตัดของเส้น ซึ่งจะมีทั้งหมด 10 จุด ซึ่งหุ่นยนต์อัตโนมัติ จะได้คะแนนก็ต่อเมื่อนำชิ้นงานมาวางไว้บนจุดวางชิ้นงานที่ตรงกับสีของจุดวางชิ้นงานตามโจทย์ที่ได้รับ โดยจะได้รับคะแนนเมื่อหุ่นยนต์ปล่อยชิ้นงาน โดยที่ชิ้นงานจะต้องไม่ตกลงมาจากจุดวางชิ้นงาน และจุดบิงโกนั้นจะมีเพียงจุดเดียว ซึ่งจุดนั้นจะอยู่ตรงกลางสนามระหว่างฝั่งสีเขียวและฝั่งสีน้ำเงินของฝั่งหุ่นยนต์อัตโนมัติ
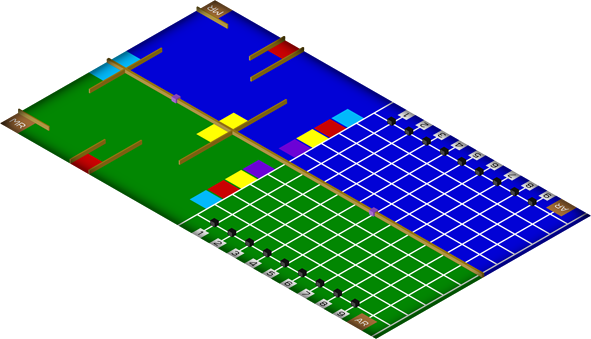
3. สนามแข่งขันหุ่นยนต์
ขนาดสนามแข่งขัน : สนามแข่งขันขนาด 854 x 488 cm. ทำจากไม้อัดขนาดมาตรฐาน 14 แผ่น แบ่งฝั่ง สีเขียว และ สีน้ำเงิน ด้วยไม้หน้าสาม
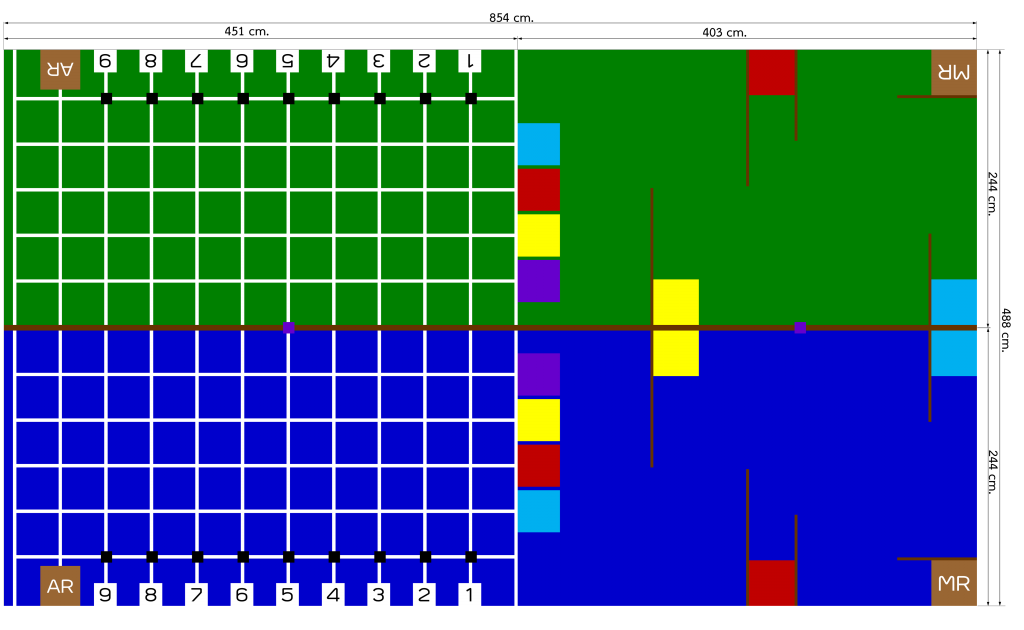
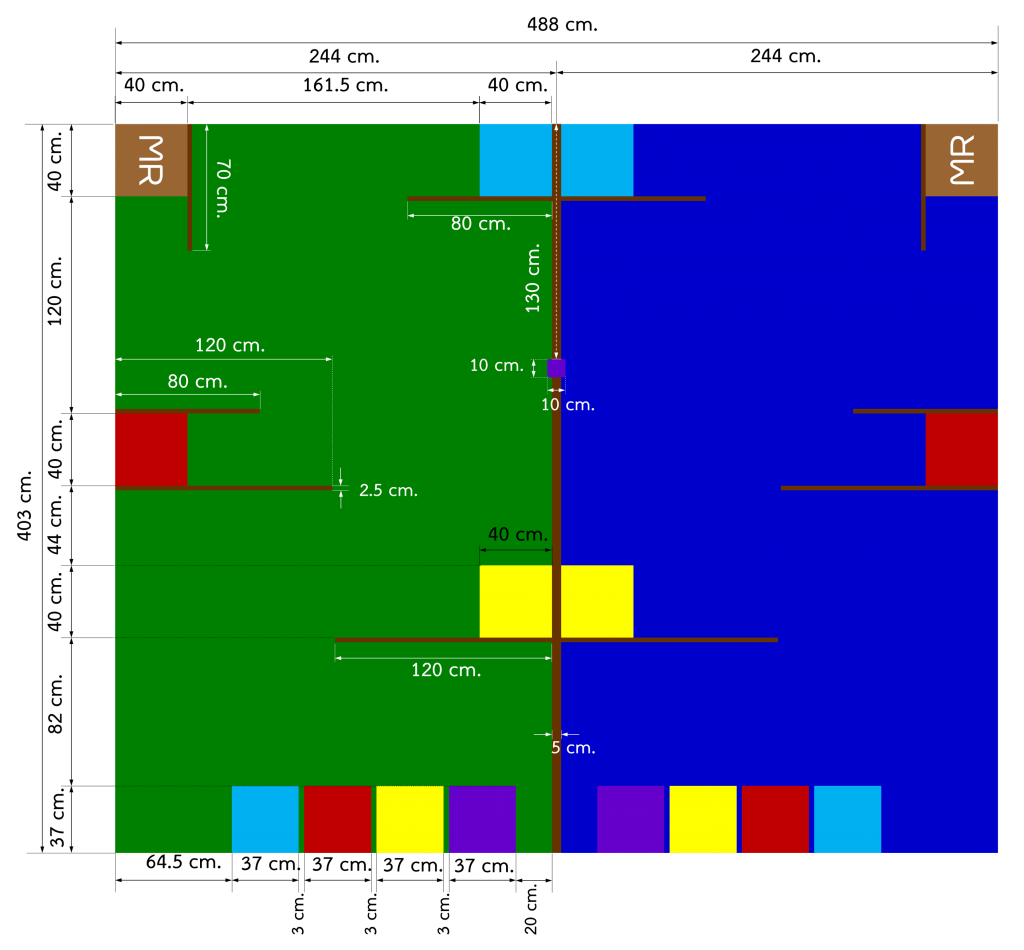
3.1 ส่วนแรกนั้นจะเป็นฝั่งของหุ่นยนต์บังคับด้วยมือ ซึ่งมีพื้นสนามสีน้ำเงิน และสีเขียวมีขนาด 488 cm. x 403 cm. โดยแบ่งออกเป็นผั่งสีเขียว และสีน้ำเงินฝั่งละ 244 cm. x 403 cm. โดยแต่ละฝั่งมีรายละเอียดดังนี้
- จุดเริ่มต้นของหุ่นยนต์บังคับด้วยมือ เรียกว่าจุดเริ่มงาน MR ซึ่งจุดนี้จะอยู่ที่มุมสนามมีขนาด 40 cm. X 40 cm. ทาด้วยสีน้ำตาล ภายในเขียนอักษร MR สีขาว
- คลังสินค้า 4 คลัง คือ คลังสินค้าสีเหลือง สีแดง สีฟ้า และสีม่วง ที่ทาด้วยสีน้ำ โดยคลังสินค้าสีเหลือง สีแดง สีฟ้า นั้นจะมีพื้นที่ขนาดเท่ากันคือ 40 cm. X 40 cm. ซึ่งวางอยู่บนพื้นราบ ณ ตำแหน่งต่างๆ ในสนามดังแสดงในรูป ส่วนคลังสีม่วงจะมีลักษณะเป็นแท่นขนาด กว้าง 10 cm. ยาว 10 cm. และสูง 10 cm. ซึ่งจุดนี้ทั้งสองทีมจะใช้ร่วมกัน
- จุดส่งชิ้นงาน มีทีมละ 4 จุด คือ จุดสีเหลือง สีแดง สีฟ้า และสีม่วง ทาด้วยสีน้ำ มีขนาด 37 cm. X 37cm. ซึ่งอยู่ ณ ตำแหน่งต่างๆ ในสนามดังแสดงในรูป
- สิ่งกีดขวางในสนามนั้นจะลักษณะเป็นไม้หน้าสามทาสีด้วยสีน้ำตาลมีความสูง 6.5 cm. กว้าง 2.5 cm. และมีความยาวในแต่ละที่ดังแสดงในรูป
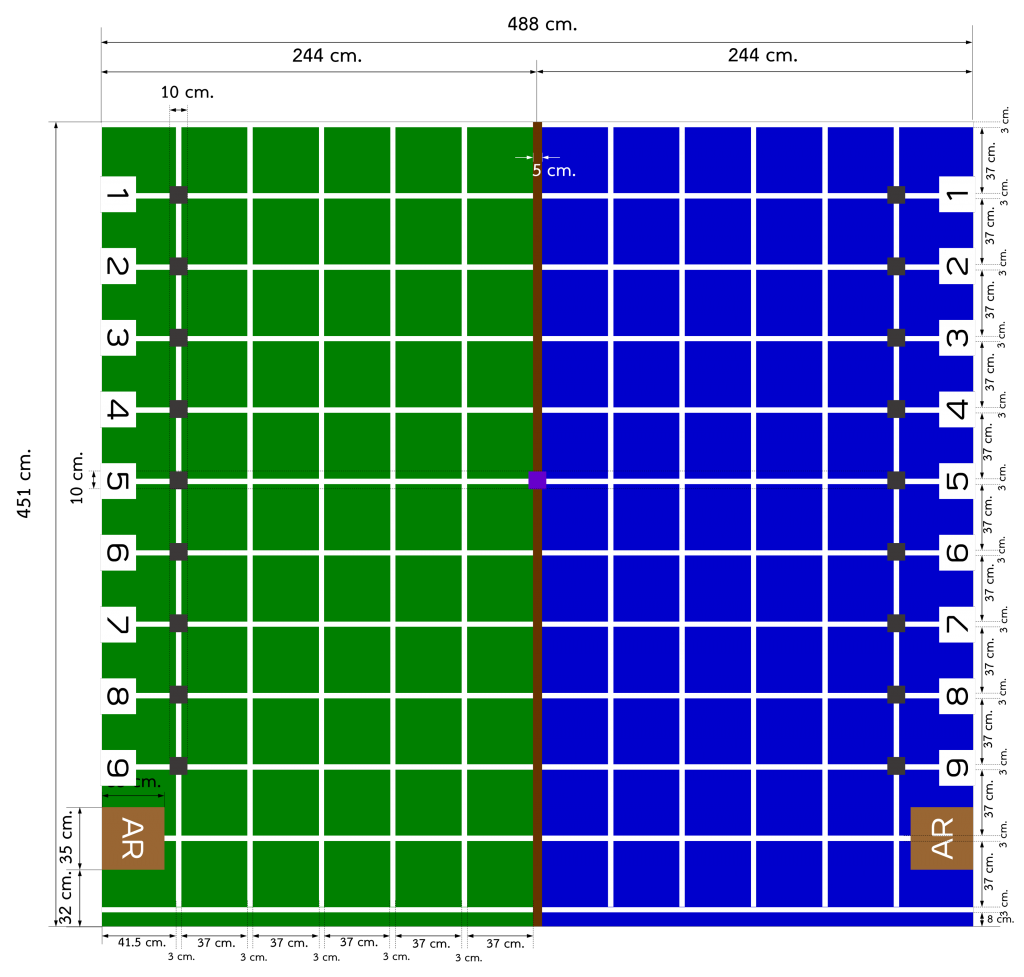
3.2 ส่วนที่สองจะเป็นฝั่งของหุ่นยนต์อัตโนมัติ ซึ่งมีพื้นสนามสีน้ำเงิน และสีเขียวมีขนาด 488 cm. x 451 cm. โดยแบ่งออกเป็นผั่งสีเขียว และสีน้ำเงินฝั่งละ 244 cm. x 451 cm. ซึ่งในสนามจะมีเส้นลักษณะเป็นตารางสี่เหลี่ยมจตุรัสขนาดช่องละ 40 cm. X 40 cm. แบ่งด้วยเส้นสีขาวขนาดของเส้นความกว้าง 3 cm. โดยแต่ละฝั่งมีรายละเอียดดังนี้
- จุดเริ่มต้นของหุ่นยนต์อัตโนมัติ เรียกว่าจุดเริ่มงาน AR ซึ่งจุดนี้จะอยู่ที่มุมสนามมีขนาด 35 cm. X 35 cm. ทาด้วยสีน้ำตาล ภายในเขียนอักษร AR สีขาว
- จุดวางชิ้นงาน 10 จุด แบ่งออกเป็นจุดวางชิ้นงานปกติ 9 จุด และจุดวางชิ้นงานบิงโก 1 จุด โดยแต่ละจุดจะมีลักษณะเป็นแท่นมีขนาด กว้าง 10 cm. ยาว 10 cm. และสูง 10 cm. ซึ่งจุดวางชิ้นงานปกติ แต่ละจุดจะมีสีระบุไว้ ซึ่งอาจจะเป็นสีเหลือง แดง หรือฟ้า ขึ้นอยู่กับโจทย์ที่ได้รับ ในขณะที่จุดวางชิ้นงานสีม่วงจะอยู่ที่จุดตรงกลางสนามระหว่างฝั่งสีเขียวและฝั่งสีน้ำเงิน ของสนามแข่งขันหุ่นยนต์ฝั่งอัตโนมัติ
4. หุ่นยนต์ที่ใช้ในการแข่งขันและข้อจำจัด
แต่ละทีมสามารถมีหุ่นยนต์ได้ 2 ตัว คือ หุ่นยนต์บังคับดัวยมือ (Manual Robot) จำนวน 1 ตัว และหุ่นยนต์อัตโนมัติ (Automatic Robot) จำนวน 1 ตัว
4.1 หุ่นยนต์บังคับด้วยมือ
1) ก่อนเริ่มการแข่งขันหุ่นยนต์บังคับด้วยมือจะต้องมีขนาดไม่เกินความกว้าง 30 ซม. ความยาว 30 ซม. และความสูง 30 ซม.
2) หลังจากการแข่งขันเริ่มขึ้นหุ่นยนต์บังคับด้วยมือสามารถเปลี่ยนแปลงขนาดและรูปร่างได้ แต่จะต้องมีเส้นผ่าศูนย์กลางไม่เกิน 60 ซม. เมื่อตรวจสอบจากด้านบน และไม่มีการแยกออกเป็นสองตัว
3) หุ่นยนต์จะต้องมีน้ำหนักไม่เกิน 3 กิโลกรัม
4) หุ่นยนต์บังคับด้วยมือต้องเป็นการควบคุมแบบไร้สายเท่านั้น ไม่จำกัดรูปแบบสัญญาณแต่จะต้องมีช่องสัญญาณสำรองหากมีสัญญาณชนกันระหว่างแข่งขัน
5) อนุญาตให้สมาชิกในทีมเพียงคนเดียวควบคุมหุ่นยนต์บังคับด้วยมือ โดยอยู่นอกสนาม
6) พลังงานที่ใช้จะต้องเป็นแบตเตอร์รี่ และมีแรงดันไฟ ไม่เกิน 24-25 โวลต์
7) พลังงานลมหรือระบบนิวเมติกที่ใช้นั้น จะต้องไม่เกิน 6 บาร์
4.2 หุ่นยนต์อัตโนมัติ
1) หุ่นยนต์อัตโนมัติจะต้องทำงานเองโดยไม่มีการควบคุมใดๆจะผู้แข่งขัน
2) ไม่อนุญาตให้สมาชิกในทีมสัมผัสหุ่นยนต์ในขณะหุ่นยนต์อัตโนมัติเริ่มต้นทำงาน
3) ก่อนเริ่มการแข่งขันหุ่นยนต์อัตโนมัติจะต้องมีขนาดไม่เกินความกว้าง 30 ซม. ความยาว 30 ซม. และความสูง 30 ซม.
4) หลังจากการแข่งขันเริ่มขึ้นหุ่นยนต์อัตโนมัติสามารถเปลี่ยนแปลงขนาดและรูปร่างได้ แต่จะต้องมีเส้นผ่าศูนย์กลางไม่เกิน 60 ซม. เมื่อตรวจสอบจากด้านบน และไม่มีการแยกออกเป็นสองตัว
5) หุ่นยนต์จะต้องมีน้ำหนักไม่เกิน 3 กิโลกรัม
6) พลังงานที่ใช้จะต้องเป็นแบตเตอร์รี่ และมีแรงดันไฟ ไม่เกิน 24-25 โวลต์
7) พลังงานลมหรือระบบนิวเมติกที่ให้นั้น แรงดันลมจะต้องไม่เกิน 6 บาร์
8) ในการแข่งขันนั้นอนุญาตให้มีการแก้ไข้โปรแกรมได้แต่จะต้องนำหุ่นยนต์ออกมาจากสนาม
5. ชิ้นงาน
ชิ้นงานนั้นจะมีทั้งหมด 10 ชิ้นงาน โดยทั้งหมดจะมีขนาดเท่ากันแต่แตกต่างกันที่สี โดยชิ้นงานแต่ละชิ้นงานจะมีลักษณะเป็นทรงลูกบาศก์ ซึ่งทำมาจากการ ปริ้นขึ้นรูปโดยเครื่องปริ้นสามมิติ โดยปริ้นให้มีความหนาแน่นที่ 20 เปอร์เซ็นต์ และจะมีขนาดความกว้างความยาวและความสูงเท่ากับ 5 X 5 X 5 cm.
- ชิ้นงานนั้นจะวางอยู่ 4 ตำแหน่งตามคลังสินค้าทั้ง 4 สี ซึ่งจะวางอยู่บนพื้น 3 คลัง และจะมีคลังสินค้าสีม่วงอีก 1 คลัง ที่อยู่บนแท่น ซึ่งประกอบด้วย
1 พื้นที่สีเหลือง 40 cm. X 40 cm. ทาด้วยสีเขียว ตำแหน่งนี้จะมีชิ้นงานอยู่ทั้งหมด 4 ชิ้นงาน
2 พื้นที่สีแดง 40 cm. X 40 cm. ทาด้วยสีเหลือง ตำแหน่งนี้จะมีชิ้นงานอยู่ทั้งหมด 3 ชิ้นงาน
3 พื้นที่สีฟ้า 40 cm. X 40 cm. ทาด้วยสีขาว ตำแหน่งนี้จะมีชิ้นงานอยู่ทั้งหมด 2 ชิ้นงาน
4 พื้นที่สีม่วง 10 cm. X 10 cm. X 10 cm. ทาด้วยสีม่วง ตำแหน่งนี้จะมีชิ้นงานอยู่ 1 ชิ้นงานพื้นที่นี้จะอยู่ตรงกลางสนามระหว่างฝั่งสีเขียวและฝั่งสีน้ำเงิน ของฝั่งสนามหุ่นยนต์บังคับด้วยมือ
6. วิธีการแข่งขันและเกณฑ์การตัดสิน
6.1 วิธีการแข่งขัน
6.1.1 ผู้เข้าร่วมการแข่งขันจำนวน 3 คนเข้าประจำตำแหน่งที่กรรมการกำหนดให้
6.1.2 ผู้เข้าร่วมการแข่งขันส่งตัวแทนทีมละ 1 คนเพื่อทำการจับฉลากโจทย์ในการแข่งขัน
6.1.3 ผู้เข้าร่วมการแข่งขันทีมใดมีข้อซักถาม ให้ดำเนินการสอบถามก่อนการแข่งขันเท่านั้น
6.1.4 เมื่อคณะกรรมการให้สัญญาณเริ่มการแข่งขัน ให้หุ่นยนต์ทำภารกิจตามเงื่อนไขและระยะเวลาที่กำหนดให้
6.1.5 คณะกรรมการจะพิจารณาให้คะแนนตามเกณฑ์และกติกาที่กำหนดไว้
6.1.6 ผู้เข้าร่วมการแข่งขันทีมใดมีข้อซักถาม ก่อนที่จะออกจากสนามการแข่งขัน
6.1.7 ผู้เข้าแข่งขันทีมใดที่กรรมการตรวจสอบความถูกต้องและให้คะแนนแล้วให้ออกจากสนามการแข่งขันได้
6.1.8 การตัดสินของกรรมการถือว่าเป็นที่สิ้นสุด
6.2 เกณฑ์การให้คะแนน
6.2.1 หุ่นยนต์บังคับด้วยมือนำชิ้นงานไปวางในจุดส่งชิ้นงานแต่ล่ะสี จะได้คะแนนตามสีดังนี้
– ชิ้นงานสีเหลือง ชิ้นละ 5 คะแนน (4 ชิ้นงาน)
– ชิ้นงานสีแดง ชิ้นละ 10 คะแนน (3 ชิ้นงาน)
– ชิ้นงานสีฟ้า ชิ้นละ 15 คะแนน (2 ชิ้นงาน)
– ชิ้นงานสีม่วง ชิ้นละ 20 คะแนน (1 ชิ้นงาน)
6.2.2 หุ่นยนต์อัตโนมัติสามารถนำชิ้นงานไปวางยังจุดวางชิ้นงานได้ถูกต้องตามสี และชิ้นงานไม่ตกจากจุดวางชิ้นงานจะได้คะแนนตามตำแหน่งดังนี้
– จุดวางชิ้นงานหมายเลข 1, 2 และ 3 จะได้รับคะแนน 5 คะแนน ต่อจุดวางชิ้นงาน
– จุดวางชิ้นงานหมายเลข 4, 5 และ 6 จะได้รับคะแนน 10 คะแนน ต่อจุดวางชิ้นงาน
– จุดวางชิ้นงานหมายเลข 7, 8 และ 9 จะได้รับคะแนน 15 คะแนน ต่อจุดวางชิ้นงาน
– จุดบิงโก จะได้รับคะแนนชิ้นงานละ 60 คะแนน
โดยคะแนนรวมสูงสุดที่แต่ละทีมสามารถทำได้จะมีค่าเท่ากับ 250 คะแนน ซึ่งเป็นการวางได้ครบทุกชิ้นงาน และสามารถทำบิงโกได้
7. ข้อกำหนดในการแข่งขัน
7.1 การขอ Retry
การขอ Retry คือ เหตุการณ์ที่ผู้ควบคุมหุ่นยนต์ร้องขอรีไทร์ เพื่อนำหุ่นยนต์กลับมาในจุดเริ่มงานของหุ่นยนต์ตัวนั้น
1) ผู้ควบคุมหุ่นยนต์จะต้องยกแขนข้างใดข้างหนึ่ง ชี้ขึ้นฟ้าสุดแขน และพูดคำว่า “ขอ Retry”
2) เมื่อขอ Retry แล้ว จะต้องรีบนำหุ่นยนต์ออกจากพื้นที่สนาม เพื่อนำหุ่นยนต์กลับมาพื้นที่เพื่อแก้ไขและทำการปล่อยหุ่นยนต์เข้าสู่สนามโดยเร็วที่สุด
3) ผู้ควบคุมหุ่นยนต์สามารถเข้าในสนาม เพื่อนำหุ่นยนต์ออกจากสนามได้เพียงทีมละหนึ่งคนเท่านั้น
4) ผู้ควบคุมหุ่นยนต์ สามารถขอ Retry เมื่อวางกล่องภารกิจได้สมบูรณ์แล้ว
7.2 การบังคับ Retry
การบังคับ Retry คือ เหตุการณ์ที่กรรมการตัดสินเห็นสมควรให้ผู้ควบคุมหุ่นยนต์ต้องรีไทร์ โดยเมื่อผู้เข้าแข่งขันโดนบังคับ Retry ผู้เข้าแข่งขันจะต้องนำหุ่นยนต์กลับมาวางในจุดเริ่มงานของหุ่นยนต์ตัวนั้น และปล่อยหุ่นยนต์อีกครั้งเมื่อพร้อมและกรรมการให้สัญญาณ โดยการบังคับ Retry จะเกิดขึ้นเมื่อมีเหตุการณ์ดังนี้
1) หุ่นยนต์ล้ำเข้าไปในแดนฝ่ายตรงข้าม
2) หุ่นยนต์ออกนอกสนาม
3) หุ่นยนต์สัมผัสกับหุ่นยนต์ฝ่ายตรงข้าม
4) หุ่นยนต์ชนชิ้นงานออกจากคลังสินค้า จากจุดส่งชิ้นงานและจุดวางชิ้นงาน
5) หุ่นยนต์ล้ำเข้าไปในโซนทำคะแนน
6) หุ่นยนต์หยิบชิ้นงานไม่สำเร็จ (ชิ้นงานออกนอกจุดส่งชิ้นงานหรือทำชิ้นงานตกหล่นในสนาม)
7) กรณีที่หุ่นยนต์อัตโนมัติทำชิ้นงานสัมผัสกับพื้นสนามในโซนอิสระจะถูกบังรีไทร์และชิ้นงานจะถูกนำกลับไปวางยังจุดส่งชิ้นงานการวางจะวางโดยกรรมการสนามโดยที่วางในตำแหน่งกลึ่งกลางของจุดส่งชิ้นงาน
8) กรณีที่หุ่นยนต์บังคับด้วยมือทำชิ้นงานสัมผัสกับพื้นสนามจะถูกบังคับรีไทร์และชิ้นงานจะถูกนำกลับไปวางยังคลังสินค้าตามสีนั้นๆ โดยกรรมการสนามจะวางในตำแหน่งเดิมก่อนที่หุ่นยนต์จะหยิบมา และหุ่นยนต์บังคับด้วยมือจะต้องกลับไปเริ่มต้นใหม่ในพื้นที่จุดเริ่มงาน MR
9) กรณีที่มีการชนกันของหุ่นยนต์ ทั้งสองทีมจะถูกบังคับรีไทร์
10) หุ่นยนต์บังคับด้วยมือเข้าไปในพื้นที่หุ่นยนต์อัตโนมัติ โดยมีการสัมผัสพื้นสนาม
11) หุ่นยนต์อัตโนมัติเข้าไปในพื้นที่หุ่นยนต์บังคับด้วยมือ ในบริเวณอื่นๆ นอกจาพื้นที่จะส่งต่อชิ้นงาน
หมายเหตุ ทั้งการขอ Retry และการบังคับ Retry ของหุ่นยนต์ในฝั่งของหุ่นยนต์บังคับด้วยมือ และหุ่นยนต์ฝั่งอัตโนมัติจะเป็นอิสระต่อกัน นั่นคือหากหุ่นยนต์ตัวใดตัวหนึ่งขอ Retry หุ่นยนต์อีกก็ยังสามารถทำภารกิจต่อไปได
8. เวลาที่ใช้ในการแข่งขัน
8.1.ก่อนเริ่มการแข่งขันแต่ละทีมมีเวลาจัดเตรียมหุ่นยนต์ลงสนามแข่งขันเป็นเวลา 1 นาทีหลังจากได้รับสัญญาณแจ้งเตือน
8.2.ในแต่ละรอบการแข่งขันจะใช้เวลา 3 นาที
9. เกณฑ์การตัดสินแพ้ชนะ
9.1.ตัดสินจากฝ่ายใดฝ่ายหนึ่งสามารถนำชิ้นงานบิงโก ไปว่างไว้ในจุดบิงโกสำเร็จ “ก่อนจะเป็นฝ่ายชนะ ”
9.2.ถ้าหากว่าไม่มีทีมใดสามารถทำบิงโกได้จะตัดสินจากเกมการแข่งขัน ที่ผลรวมของคะแนนที่ได้ จากการวางชิ้นงาน“ ทีมที่ทำคะแนนได้มากที่สุดเป็นฝ่ายชนะ ”
9.3.ตัดสินจากการถูกบังคับรีไทร์ ในกรณีผลรวมของคะแนนเท่ากัน“ ทีมที่มีจำนวนการถูกบังคับรีไทร์น้อยที่สุด เป็นฝ่ายชนะ ”
9.4.ตัดสินจากจำนวนการขอรีไทร์ ในกรณี ที่ การตัดสินใน ข้อ 2 และ 3 เท่ากัน“ ทีมที่มีจำนวนการขอรีไทร์น้อยที่สุด จะเป็นฝ่ายชนะ ”
9.5.หากว่าการตัดสินในข้อ1-4 ตัดสินไม่ได้นั้น จะตัดสินจากทีมที่สามารถทำคะแนนจากชิ้นงานแรกในฝั่งของหุ่นยนต์บังคับด้วยมือได้ก่อนจะเป็นฝ่ายชนะ
9.6.หากว่าการตัดสินในข้อ1-5 ตัดสินไม่ได้นั้น จะตัดสินจากการพิจารณาของกรรมการและทีมที่เข้าแข่งขันทั้งสองฝ่ายเพื่อจะทำการแข่งขันใหม
10. การปรับแพ้
10.1.หุ่นยนต์ทำลายสนาม
10.2.หุ่นยนต์ทำลายเกมการแข่งขันจนไม่สามารถแข่งขันต่อได้
10.3.ผู้เข้าแข่งขันแสดงถึงกิริยาที่ไม่เหมาะสม
