

⊗ กติกาการแข่งขันหุ่นยนต์ขนถ่ายวัสดุ ครั้งที่ 2 [ pdf ]
⊗ ใบสมัครแข่งขันหุ่นยนต์ขนถ่ายวัสดุ ครั้งที่ 2 [ pdf ] [ docx ]
⊗ โปสเตอร์ประชาสัมพันธ์ขนาด A3 [ jpg ]
⊗ หนังสือเชิญเข้าร่วมแข่งขัน [ pdf]
{kind=link}

รางวัลรองชนะเลิศ อันดับที่ 1 ได้รับ โล่รางวัลพร้อมเกียรติบัตรและเงินรางวัล 8,000 บาท
รางวัลรองชนะเลิศ อันดับที่ 2 ได้รับ โล่รางวัลพร้อมเกียรติบัตรและเงินรางวัล 5,000 บาท
รางวัลนักประดิษฐ์ยอดเยี่ยม ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลเทคนิคยอดเยี่ยม ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลศิลปะยอดเยี่ยม ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลความคิดสร้างสรรค์ ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลขวัญใจมหาชน ได้รับ เกียรติบัตรและเงินรางวัล 1,000 บาท
รางวัลผู้เข้าร่วมแข่งขัน ได้รับเกียรติบัตร
กติกาการแข่งขันหุ่นยนต์ขนถ่ายวัสดุ
RMUTP ROBOCON 2016
จัดโดย สาขาวิชาวิศวกรรมแมคคาทรอนิกส์ คณะวิศวกรรมศาสตร์
มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร
AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA
1. ความเป็นมาการแข่งขัน
เนื่องจากมหาวิทยาลัยเทคโนโลยีราชมงคลพระนครได้จัดงานครบรอบ 12 ปี มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร ซึ่งจัดขึ้นระหว่างวันที่ 19 – 20 มกราคม 2560 ณ ศูนย์พณิชยการพระนคร มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร ทางมหาวิทยาลัยฯ จึงได้สนับสนุนการให้มีการจัดกิจกรรมประกวดแข่งขันหุ่นยนต์ในระดับชาติ โดยมีวัตถุประสงค์เพื่อพัฒนาศักยภาพของนักเรียนนักศึกษาให้สามารถนำความรู้ที่ได้จากชั้นเรียนมาประยุกต์ใช้งานจริงได้ ซึ่งจะทำให้เห็นถึงความสำคัญของการเรียนการสอนในศาสตร์แห่งวิศวกรรม ซึ่งให้ความสำคัญกับพื้นฐานเทคโนโลยีและเพื่อให้นักศึกษาฝึกทักษะในการปฏิบัติงาน ตลอดจนสามารถประยุกต์ใช้ความรู้ สามารถเลือกนำเครื่องมือ อุปกรณ์ และเทคโนโลยีมาใช้ได้อย่างมีประสิทธิภาพ ซึ่งส่งผลให้เห็นคุณค่าของการนำความรู้เชิงวิศวกรรมศาสตร์มาประยุกต์ใช้ให้ดียิ่งขึ้น และให้ความสำคัญกับการพัฒนาการคิดสร้างสรรค์ และการออกแบบเทคโนโลยีการนำความรู้เกี่ยวกับแมคคานิกส์ อิเล็กทรอนิกส์ ทางกลศาสตร์ และเทคโนโลยีคอมพิวเตอร์มาบูรณาการกับสาระวิทยาศาสตร์ คณิตศาสตร์ ศิลปะ และสาระวิชาอื่นๆ อีกมากมาย โดยการจัดการแข่งขันในครั้งนี้ทางสาขาวิชาวิศวกรรมแมคคาทรอนิกส์ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร ได้ทำการจัดการแข่งขันหุ่นยนต์ภายใต้ชื่อ “RMUTP ROBOCON 2017” โดยแนวคิดของการแข่งขันจะเป็นการจำลองระบบขนถ่ายวัสดุแบบอัตโนมัติ โดยใช้รถขนถ่ายวัสดุอัตโนมัติ (Automated Guided Vehicles) ในอุตสาหกรรม โดยหุ่นยนต์จะต้องเคลื่อนที่ไปหยิบและนำชิ้นงาน (สินค้า) ไปวางในจุดต่างๆ ที่กำหนด
ผู้เข้าแข่งขัน : ทีมละ 2 – 4 คน ไม่รวมอาจารย์ที่ปรึกษา
คุณสมบัติผู้เข้าแข่งขัน : เป็นนักเรียน/นักศึกษาซึ่งกำลังศึกษาอยู่ในระดับอุดมศึกษา ระดับอาชีวะศึกษาหรือมัธยมศึกษา
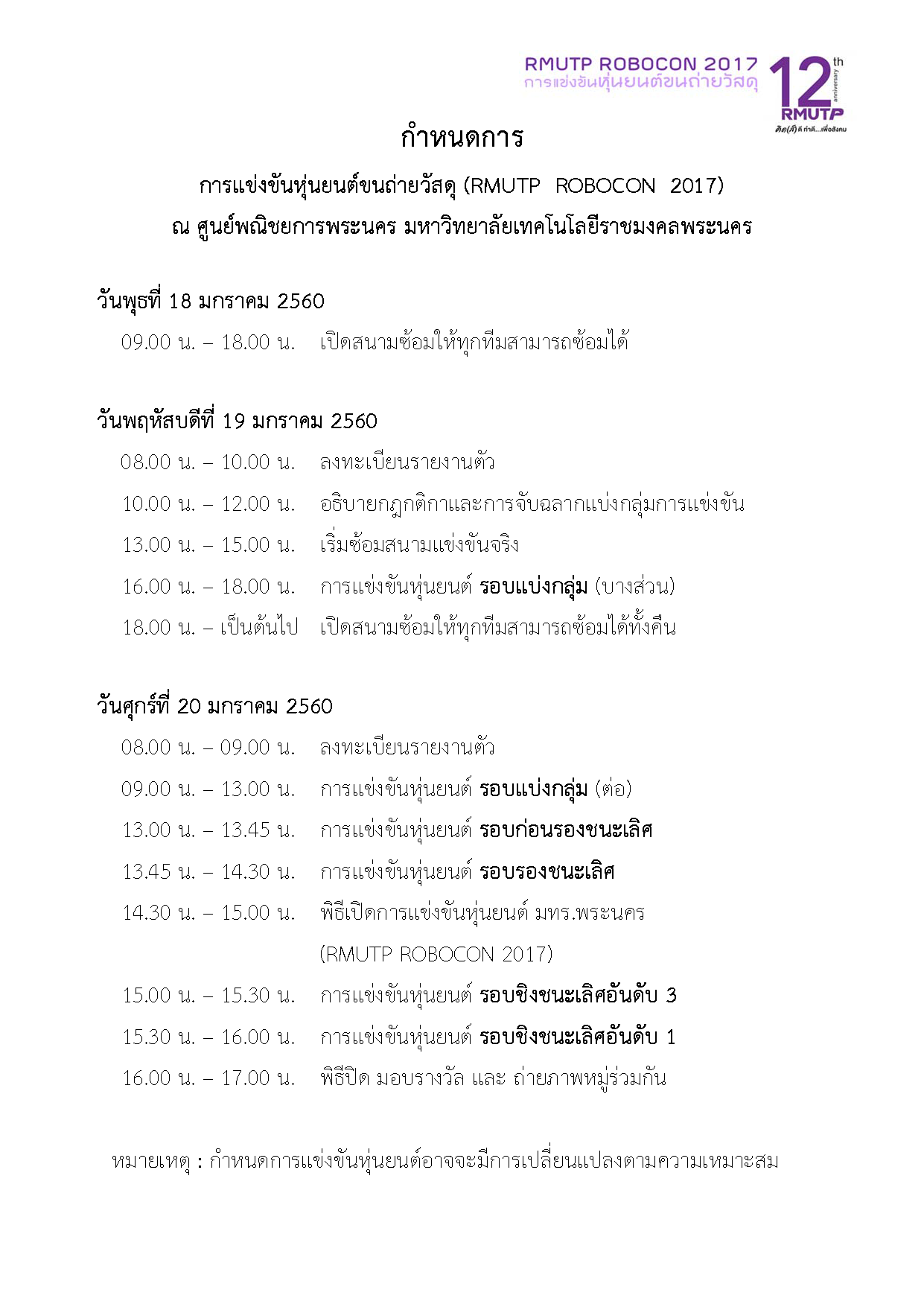
กำหนดการและสถานที่จัดการแข่งขัน : การแข่งขันหุ่นยนต์ RMUTP ROBOCON 2017 โดยจัดขึ้นระหว่างวันที่ 19 – 20 มกราคม 2560 ณ ศูนย์พณิชยการพระนคร มหาวิทยาลัยเทคโนโลยีราชมงคลพระนคร
2. รูปแบบและกติกาการแข่งขัน
การแข่งขันจะแบ่งผู้เล่นออกเป็นสองฝ่ายคือ ทีมสีเขียว และ ทีมสีน้ำเงิน โดยที่แต่ล่ะฝ่ายจะมีหุ่นยนต์ 2 ตัว ได้แก่ หุ่นยนต์บังคับด้วยมือ (Manual Robot) และ หุ่นยนต์อัตโนมัติ (Automatic Robot) ซึ่งหุ่นยนต์แต่ละตัวจะมีพื้นที่ในการทำภารกิจของตนเอง โดยเมื่อเริ่มแข่งขัน ผู้เข้าร่วมแข่งขันจะต้องบังคับหุ่นยนต์บังคับด้วยมือไปหยิบชิ้นงาน (สินค้า) เพื่อนำไปส่งต่อให้กับหุ่นยนต์อัตโนมัติในบริเวณจุดส่งชิ้นงาน หลังจากนั้นหุ่นยนต์อัตโนมัติจะทำการหยิบชิ้นงานจากบริเวณจุดส่งชิ้นงานเพื่อไปเก็บยังแท่นวางชิ้นงาน หากหุ่นยนต์อัตโนมัติสามารถปฎิบัติภารกิจวางชิ้นงานสำเร็จตามเงื่อนไขแล้วจึงจะสามารถเริ่มภารกิจบิงโกได้
โดยชิ้นงานจะมีทั้งหมด 13 ชิ้นงาน มีลักษณะเป็นวัตถุทรงสูงที่มีรูปร่างแตกต่างกัน โดยแบ่งออกเป็น 4 รูปแบบ คือ แบบสี่เหลี่ยมด้านเท่า 4 ชิ้น แบบสามเหลี่ยมด้านเท่า 4 ชิ้น แบบทรงกระบอก 4 ชิ้น และแบบหกเหลี่ยมด้านเท่า 1 ชิ้น (ชิ้นงานบิงโก) ซึ่งชิ้นงานแต่ละแบบจะถูกวางอยู่ในพื้นที่คลังสินค้า โดยชิ้นงานแบบสี่เหลี่ยม แบบสามเหลี่ยม และแบบทรงกระบอก จะถูกวางอยู่ในพื้นที่คลังสินค้าฝั่งของหุ่นยนต์บังคับด้วยมือ (ในกรอบสี่เหลี่ยมตามตำแหน่งที่กำหนดไว้) ส่วนชิ้นงานแบบหกเหลี่ยมจะถูกวางอยู่ในพื้นที่คลังสินค้าฝั่งของหุ่นยนต์อัตโนมัติ (บนแท่นสี่เหลี่ยมทรงสูงที่กำหนดไว้) ซึ่งชิ้นงานแต่ละแบบจะมีคะแนนที่แตกต่างกันออกไป
จุดส่งชิ้นงานในพื้นที่ฝั่งของหุ่นยนต์บังคับด้วยมือมีทั้งหมด 3 จุด แบ่งตามรูปแบบของชิ้นงาน โดยหุ่นยนต์บังคับด้วยมือจะต้องนำชิ้นงานจากคลังสินค้าไปส่งยังจุดส่งชิ้นงานให้ตรงกับรูปแบบของชิ้นงาน จุดส่งชิ้นงานในพื้นที่ฝั่งของหุ่นยนต์อัตโนมัติมีทั้งหมด 13 จุด มีลักษณะแท่นสี่เหลี่ยมทรงสูงสีดำ 12 แท่น (สำหรับว่างชิ้นงานแบบสี่เหลี่ยม แบบสามเหลี่ยม และแบบทรงกระบอก) และแท่นสี่เหลี่ยมทรงสูงสีม่วง 1 แท่น (สำหรับทำบิงโก)
เมื่อหุ่นยนต์บังคับด้วยมือวางชิ้นงานในจุดส่งชิ้นงานสำเร็จจะได้รับคะแนนตามรูปแบบของชิ้นงาน โดยหุ่นยนต์อัตโนมัติจะสามารถเริ่มทำภารกิจได้ก็ต่อเมื่อหุ่นยนต์บังคับด้วยมือสามารถวางชิ้นงานได้สำเร็จและได้รับคะแนนจากจุดส่งชิ้นงาน หุ่นยนต์อัตโนมัติจะเคลื่อนที่มาหยิบชิ้นงาน ณ บริเวณจุดส่งชิ้นงานในพื้นที่ฝั่งของหุ่นยนต์บังคับด้วยมือ เพื่อนำไปวางยังจุดส่งชิ้นงานในพื้นที่ฝั่งของหุ่นยนต์อัตโนมัติที่กำหนดไว้ ซึ่งแท่นดังกล่าวจะอยู่กลางสนามทั้งสองฝ่ายจะต้องใช้ร่วมกัน หากแท่นใดถูกวางชิ้นงานไปแล้วจะไม่สามารถวางชิ้นงานได้อีก ทำให้ผู้เล่นทั้งสองฝ่ายต้องแย่งกันวางชิ้นงานให้สำเร็จ ในการแข่งขันหากหุ่นยนต์อัตโนมัติของฝ่ายใดสามารถวางชิ้นงาน 3 แบบ คือ แบบสี่เหลี่ยม แบบสามเหลี่ยม และแบบทรงกระบอก (เรียงลำดับแบบใดก็ได้) สำเร็จติดต่อกัน 3 แท่น หุ่นยนต์อัตโนมัติของฝ่ายนั้นจะสามารถหยิบชิ้นงานบิงโก (ชิ้นงานแบบหกเหลี่ยม มีฝั่งละ 1 ชิ้นงาน) จากแท่นที่กำหนดไว้เพื่อนำไปวางบนแท่นบิงโก (มีเพียงแท่นเดียวอยู่ตรงกลางสนาม) ซึ่งฝ่ายที่สามารถวางชิ้นงานแบบหกเหลี่ยมบนแท่นบิงโกได้จะถือว่าจบการแข่งขันและเป็นผู้ชนะ หากไม่มีฝ่ายใดสามารถวางชิ้นงานแบบหกเหลี่ยมบนแท่นบิงโกได้ กรรมการจะติดสินด้วยการทำคะแนน โดยฝ่ายที่มีคะแนนมากกว่าจะเป็นผู้ชนะ (ในระหว่างการขนย้ายด้วยหุ่นยนต์บังคับด้วยมือและหุ่นยนต์อัตโนมัติ ชิ้นงานจะต้องถูกยกให้ลอยเหนือพื้นสนาม ไม่ให้สัมผัสกับพื้นสนาม)
พื้นที่ทำคะแนนนี้แบ่งออกเป็น 2 ส่วนหลัก คือ
- พื้นที่โซนทำคะแนนของหุ่นยนต์บังคับด้วยมือหรือเรียกว่า จุดส่งชิ้นงานในพื้นที่ฝั่งของหุ่นยนต์บังคับด้วยมือ มีทั้งหมด 3 จุด ลักษณะเป็นพื้นที่รูปสี่เหลี่ยมทาด้วยสีแดงและมีรูปแบบของชิ้นงาน (แบบสี่เหลี่ยม แบบสามเหลี่ยม และแบบวงกลม) สีขาวอยู่กลางพื้นที่รูปสี่เหลี่ยมสีแดง การวางชิ้นงานแต่ละชิ้นงานจะได้รับคะแนนตามรูปแบบของชิ้นงาน ซึ่งการส่งชิ้นงานจะสมบูรณ์และได้รับคะแนน เมื่อหุ่นยนต์บังคับด้วยมือปล่อยชิ้นงานที่มีรูปแบบเดียวกับรูปแบบบนจุดส่งชิ้นงานของฝ่ายนั้น แล้วชิ้นงานอยู่ภายในพื้นที่จุดส่งชิ้นงานโดยไม่มีส่วนใดส่วนหนึ่งของชิ้นงานออกนอกพื้นที่จุดส่งชิ้นงาน (กรรมการให้สัญญาณว่าการวางชิ้นงานสมบูรณ์)
- พื้นที่โซนทำคะแนนของหุ่นยนต์อัตโนมัติประกอบด้วย แท่นวางชิ้นงาน และ แท่นบิงโก มีลักษณะเป็นแท่นสี่เหลี่ยมจัตุรัสทรงสูง ประกอบด้วยแท่นวางชิ้นงานจำนวน 13 แท่น ลักษณะแท่นสี่เหลี่ยมทรงสูงสีดำ 12 แท่น (สำหรับว่างชิ้นงานแบบสี่เหลี่ยม แบบสามเหลี่ยม และแบบทรงกระบอก) และแท่นสี่เหลี่ยมทรงสูงสีม่วง 1 แท่น (สำหรับทำบิงโก) ซึ่งหุ่นยนต์อัตโนมัติสามารถทำคะแนนได้โดยการนำชิ้นงานจากจุดส่งชิ้นงานในพื้นที่ฝั่งของหุ่นยนต์บังคับด้วยมือมาวางบนแท่นวางชิ้นงานในพื้นที่ฝั่งของหุ่นยนต์อัตโนมัติ เมื่อหุ่นยนต์อัตโนมัติปล่อยชิ้นงานแล้วชิ้นงานจะต้องไม่ตกลงมาจากแท่นวางชิ้นงาน (กรรมการให้สัญญาณว่าการวางชิ้นงานสมบูรณ์)
ส่วนการทำคะแนนจากแท่นบิงโก หุ่นยนต์อัตโนมัติจะสามารถทำคะแนนก็ต่อเมื่อทำภารกิจวางชิ้นงานติดต่อกัน 3 แท่น ได้โดยที่รูปแบบชิ้นงานไม่ซ้ำกันสำเร็จ แล้วหุ่นยนต์อัตโนมัติจึงจะสามารถหยิบชิ้นงานแบบหกเหลี่ยมที่วางอยู่บนแท่นวางชิ้นงาน เพื่อนำไปทำคะแนนที่แท่นบิงโก โดยการทำบิงโกจะสมบูรณ์ได้ก็ต่อเมื่อหุ่นยนต์อัตโนมัติปล่อยชิ้นงานบิงโกแล้วจะต้องไม่ตกลงมาจากแท่นบิงโก
3. สนามแข่งขันหุ่นยนต์
ขนาดสนามแข่งขัน : สนามแข่งขันขนาด 610 x 732 cm. ทำจากไม้อัดขนาดมาตรฐาน 122 x 244 cm. สนามจะใช้แผ่นไม้อัดทั้ง 15 แผ่น แบ่งเป็นพื้นที่ของหุ่นยนต์บังคับด้วยมือซึ่งมี 2 ฝั่ง คือ ฝั่งสีน้ำเงิน และ ฝั่งสีเขียว และพื้นที่ของหุ่นยนต์อัตโนมัติสีน้ำตาล (รูปที่ 1)
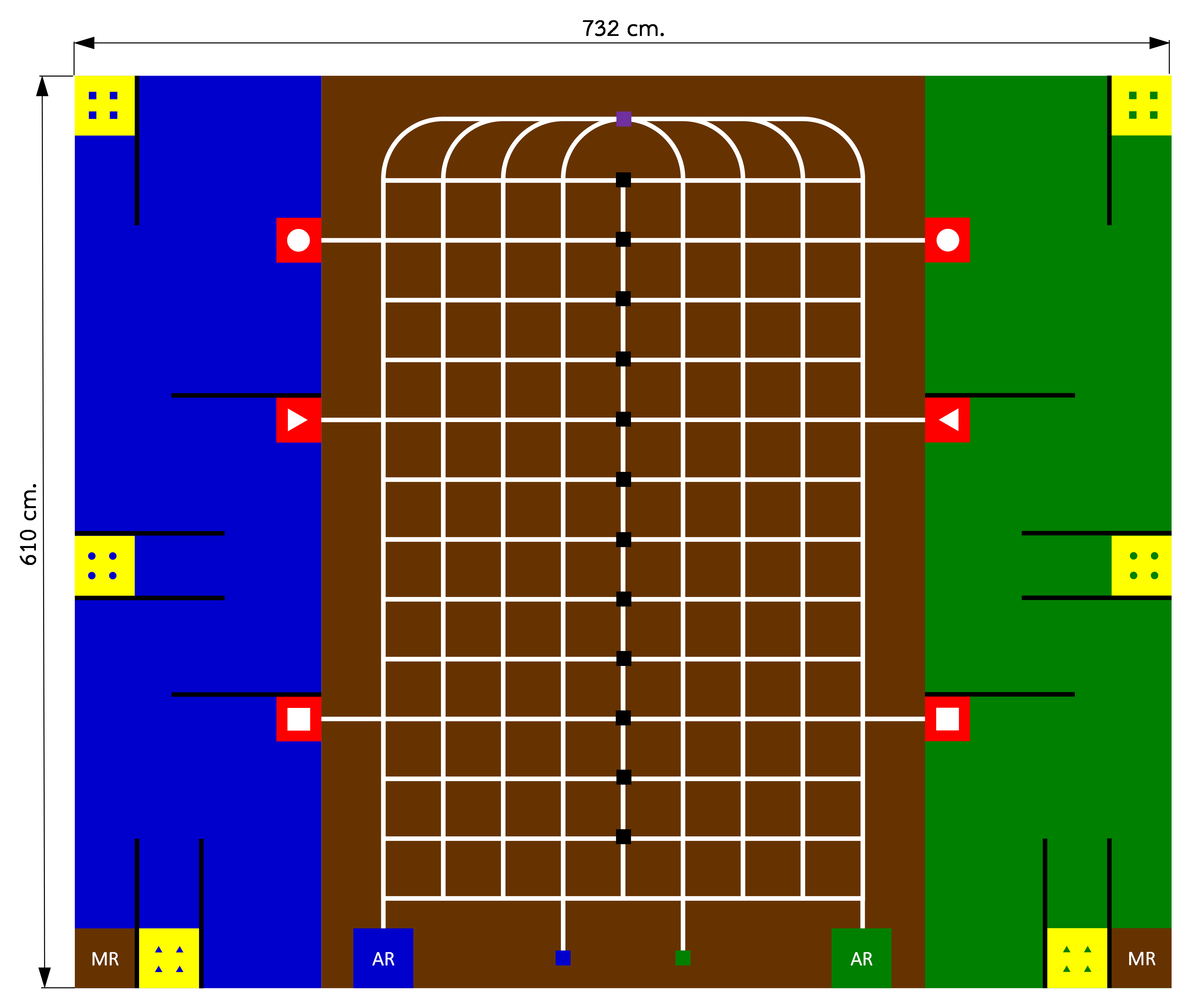
รูปที่ 1 รูปแบบและขนาดสนามแข่งขัน
3.1 ส่วนแรกนั้นจะเป็นพื้นที่ของหุ่นยนต์บังคับด้วยมือ ซึ่งมี 2 ฝั่ง ซึ่งมีพื้นสนามสีน้ำเงิน และ สีเขียว ขนาดฝั่งละ 610 cm. X 164.5 cm. โดยแต่ละฝั่งมีรายละเอียดดังนี้ (รูปที่ 2)
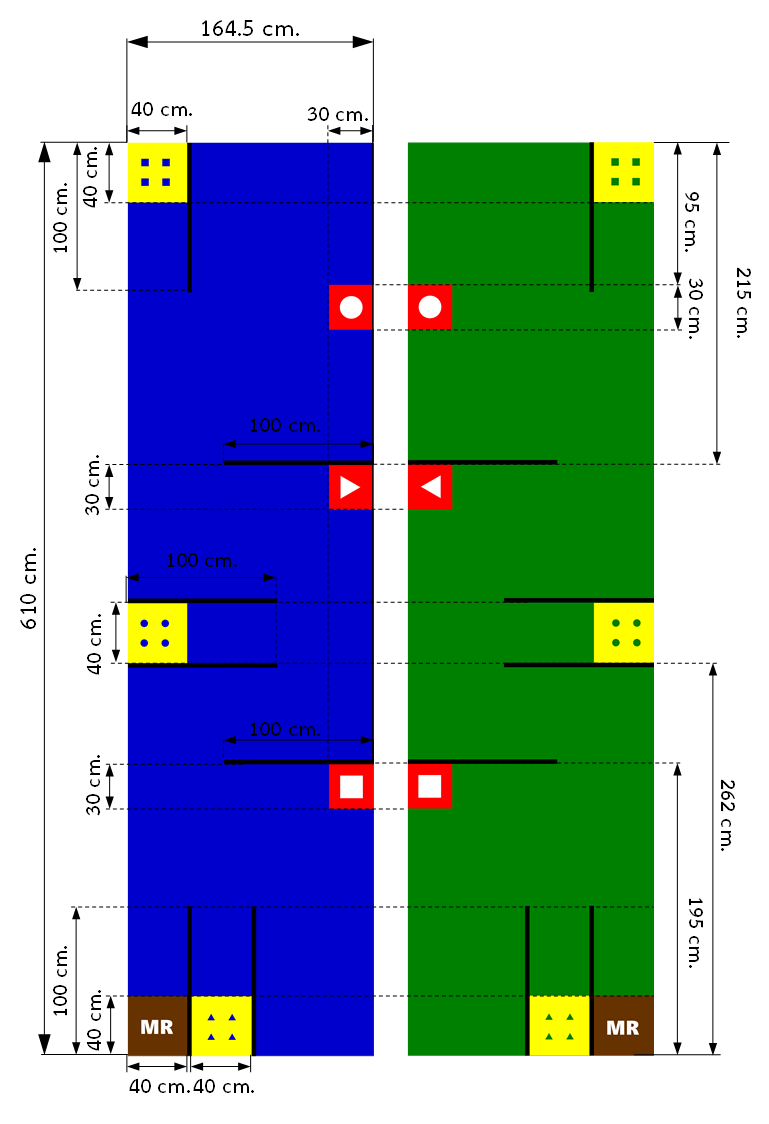
รูปที่ 2 ขนาดสนามแข่งขันของหุ่นยนต์บังคับด้วยมือ
- พื้นที่จุดเริ่มต้นของหุ่นยนต์บังคับด้วยมือ เรียกว่าจุดเริ่มงาน MR ซึ่งจุดนี้จะอยู่ที่มุมสนามของทั้ง 2 ฝั่ง มีขนาด 40 cm. X 40 cm. ทาด้วยสีน้ำตาล ภายในเขียนอักษร MR สีขาว ดังแสดงในรูปที่ 2
- พื้นที่คลังสินค้า มีทีมละ 3 คลัง คือ คลังสินค้าแบบสี่เหลี่ยม แบบสามเหลี่ยม และแบบทรงกระบอก มีขนาดพื้นที่เท่ากันคือ 40 cm. X 40 cm. ทาด้วยสีเหลือง ซึ่งอยู่บนพื้นราบ ณ ตำแหน่งต่างๆ ในสนามดังแสดงในรูป 2 และมีสัญลักษณ์ของรูปแบบชิ้นงานและตำแหน่งว่างชิ้นงานอยู่ในพื้นที่ดังกล่าวแสดงดังรูปที่ 3 (สัญลักษณ์ของรูปแบบชิ้นงานบนพื้นที่คลังสินค้าจะทาด้วยสีของแต่ละฝั่ง)
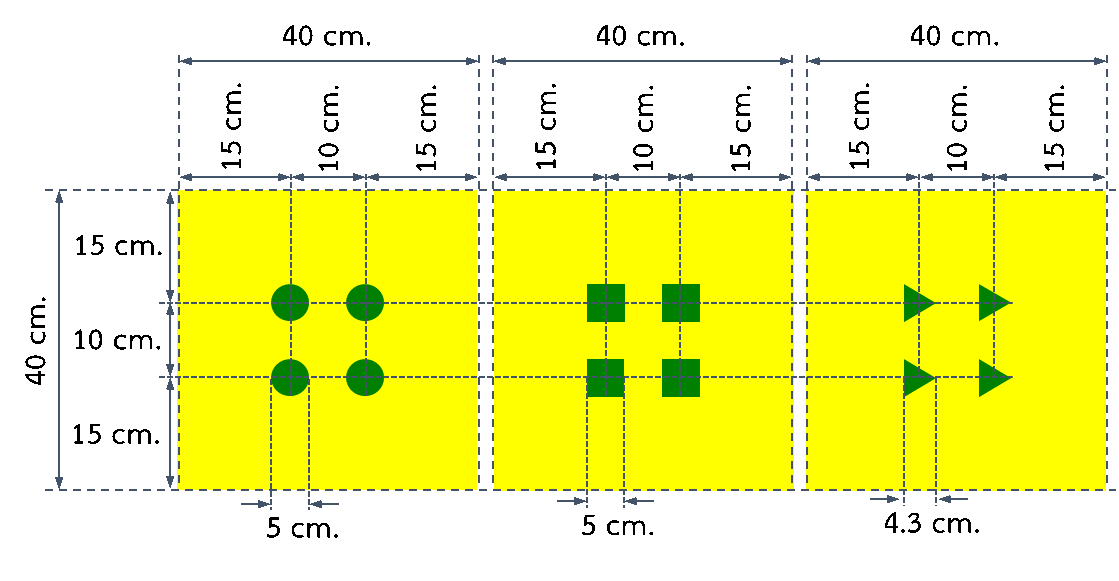
รูปที่ 3 ขนาดและรูปแบบของคลังสินค้าสนามแข่งขันหุ่นยนต์ฝั่งบังคับด้วยมือ
- พื้นที่จุดส่งชิ้นงาน มีทีมละ 3 จุด คือ คือจุดส่งชิ้นงานแบบสี่เหลี่ยม แบบสามเหลี่ยมและแบบทรงกระบอก มีขนาดพื้นที่เท่ากันคือ 30 cm. X 30 cm. ทาด้วยสีแดงซึ่งอยู่บนพื้นราบ ณ ตำแหน่งต่างๆ ในสนามดังแสดงในรูป 2 และมีสัญลักษณ์ของรูปแบบชิ้นงานทาด้วยสีขาวอยู่ในพื้นที่ดังกล่าวแสดงดังรูปที่ 4
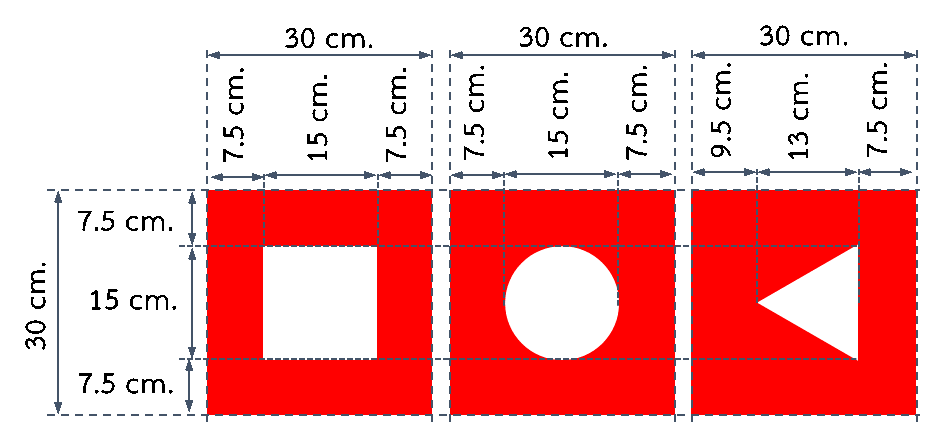
รูปที่ 4 ขนาดและรูปแบบของจุดส่งชิ้นงานของสนามแข่งขันหุ่นยนต์ฝั่งบังคับด้วยมือ
กีดขวางในสนามนั้นจะลักษณะเป็นไม้หน้าสามทาสีด้วยสีดำมีความสูง 6.5 cm. กว้าง 2.5 cm. และมีความยาว 100 cm. วางอยู่บนพื้นราบ ณ ตำแหน่งต่างๆ ในสนามดังแสดงในรูปที่ 2
3.2 ส่วนที่สองจะเป็นพื้นที่ของหุ่นยนต์อัตโนมัติ ซึ่งมีพื้นสนามสีน้ำตาล ขนาดของสนามกว้าง x ยาว เท่ากับ610 cm. X 403 cm. ในสนามจะมีเส้นลักษณะเป็นตารางสี่เหลี่ยมจัตุรัสขนาดช่องละ 40 cm. X 40 cm. แบ่งด้วยเส้นสีขาวขนาดของเส้นความกว้าง 3 cm. โดยมีรายละเอียดดังนี้ (รูปที่ 5)
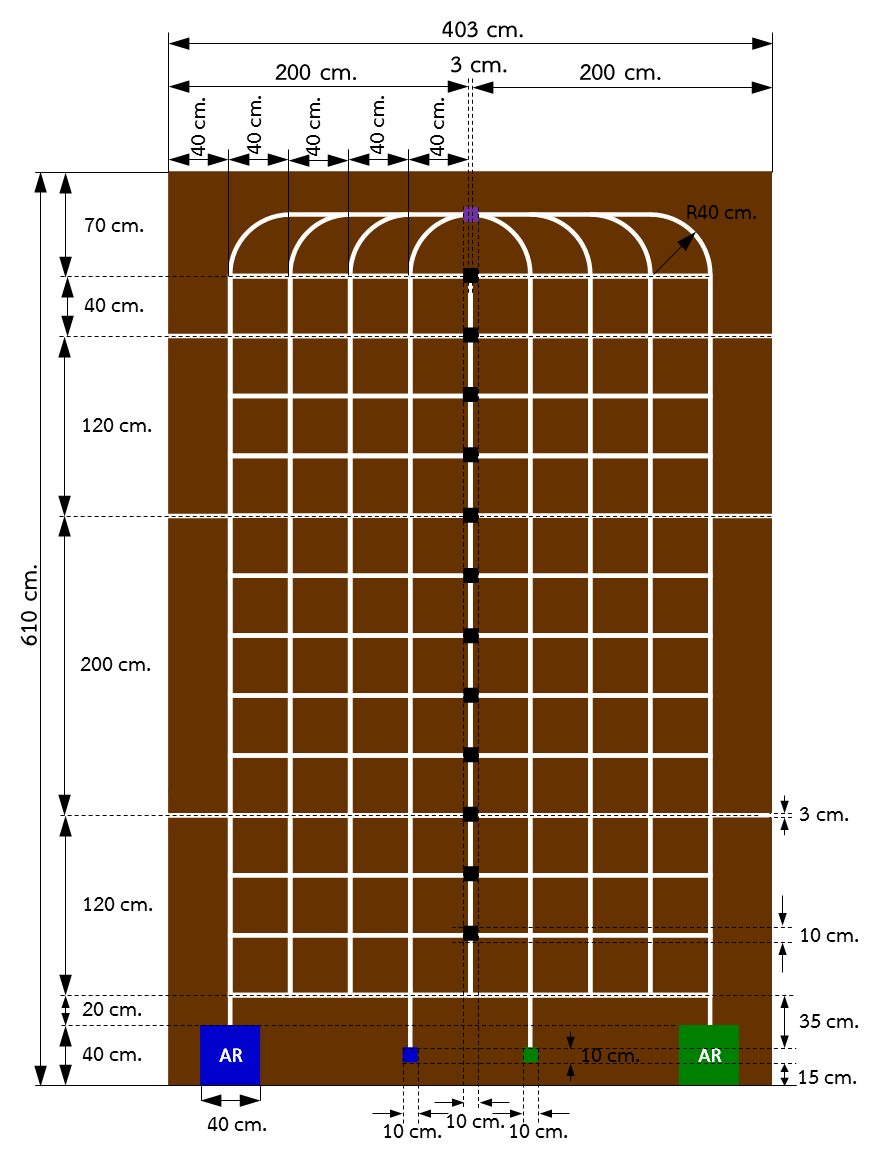
รูปที่ 5 ขนาดสนามแข่งขันของหุ่นยนต์อัตโนมัติ
- พื้นที่จุดเริ่มต้นของหุ่นยนต์อัตโนมัติ เรียกว่าจุดเริ่มงาน AR ซึ่งจุดนี้จะอยู่ที่มุมสนามของหุ่นยนต์อัตโนมัติของทั้ง 2 ฝั่ง มีขนาด 40 cm. X 40 cm. ทาด้วยสีน้ำเงินและสีเขียว ภายในเขียนอักษร AR สีขาว ดังแสดงในรูปที่ 5
- พื้นที่ว่างชิ้นงานมีลักษณะเป็นแท่นสี่เหลี่ยมจัตุรัสทรงสูง ขนาด กว้าง 10 cm. ยาว 10 cm. และสูง 10 cm. มีทั้งหมด 14 แท่น แบ่งออกเป็นแท่นวางชิ้นงานสีดำ 12 แท่น (สำหรับว่างชิ้นงานแบบสี่เหลี่ยม แบบสามเหลี่ยม และแบบทรงกระบอก) แท่นวางชิ้นงานบิงโก 2 แท่น แบ่งเป็นแท่นสีน้ำเงิน 1 แท่น แท่นสีเขียว 1 แท่น (เมื่อเริ่มแข่งขันจะมีชิ้นงานบิงโกแบบหกเหลี่ยมวางอยู่บนแท่นวางชิ้นงานบิงโกทั้ง 2 แท่น) และแท่นทำบิงโกสีม่วง 1 แท่น (สำหรับทำบิงโก) โดยตำแหน่งของแต่ละแท่นแสดงดังในรูปที่ 5 และ รูปที่ 6
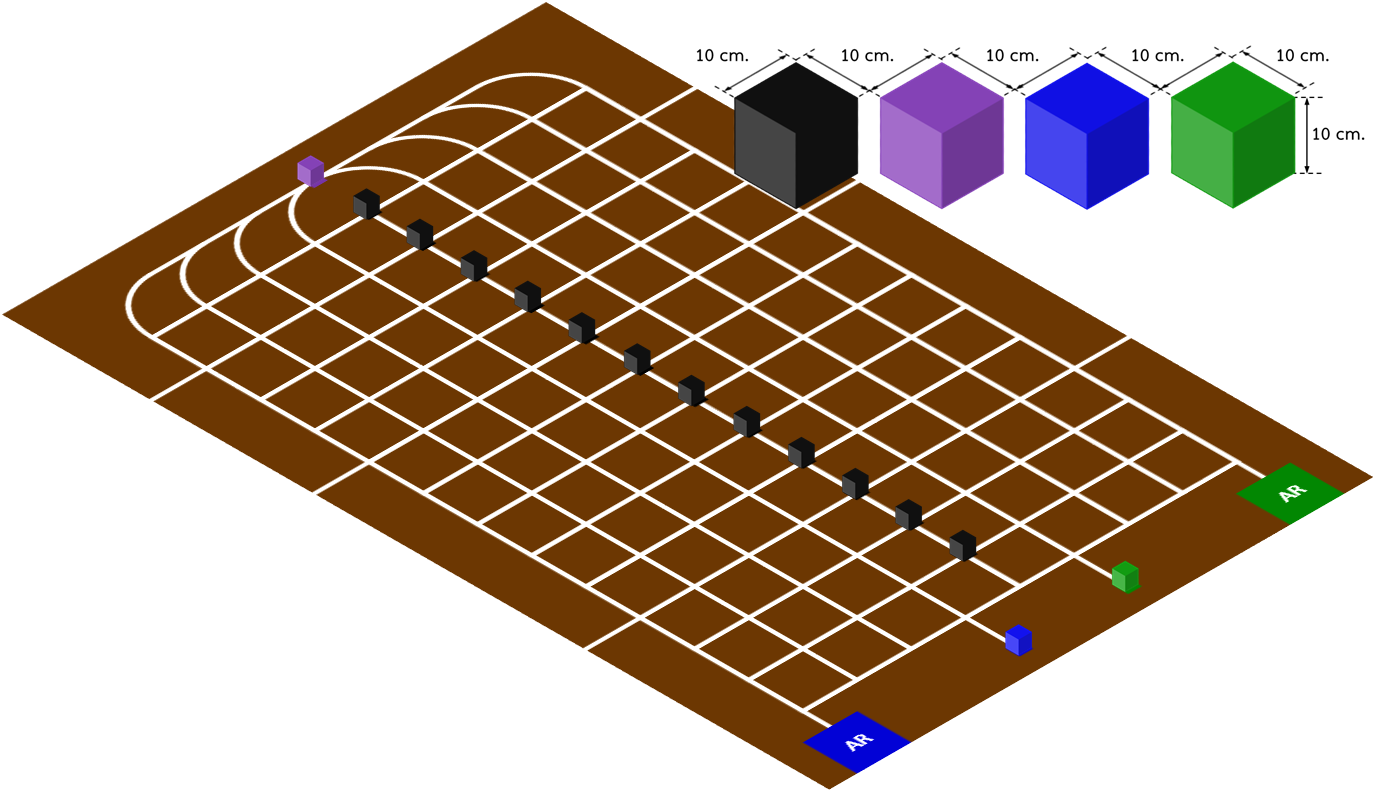
รูปที่ 6 ขนาดและตำแหน่งของแท่นว่างชิ้นงานในสนามแข่งขันของหุ่นยนต์อัตโนมัติ
- หุ่นยนต์ที่ใช้ในการแข่งขันและข้อจำจัด
แต่ละทีมสามารถมีหุ่นยนต์ได้ 2 ตัว คือ หุ่นยนต์บังคับดัวยมือ (Manual Robot) จำนวน 1 ตัว และหุ่นยนต์อัตโนมัติ (Automatic Robot) จำนวน 1 ตัว
4.1 หุ่นยนต์บังคับด้วยมือ
1) ก่อนเริ่มการแข่งขันหุ่นยนต์บังคับด้วยมือจะต้องมีขนาดไม่เกินความกว้าง 30 cm. ความยาว 30 cm. และความสูง 30 cm.
2) หลังจากการแข่งขันเริ่มขึ้นหุ่นยนต์บังคับด้วยมือสามารถเปลี่ยนแปลงขนาดและรูปร่างได้ แต่จะต้องมีเส้นผ่าศูนย์กลางไม่เกิน 60 cm. เมื่อตรวจสอบจากด้านบน และไม่มีการแยกตัว
3) หุ่นยนต์จะต้องมีน้ำหนักไม่เกิน 3 กิโลกรัม
4) หุ่นยนต์บังคับด้วยมือต้องเป็นการควบคุมแบบไร้สายเท่านั้น ไม่จำกัดรูปแบบสัญญาณแต่จะต้องมีช่องสัญญาณสำรองหากมีสัญญาณชนกันระหว่างแข่งขัน
5) อนุญาตให้สมาชิกในทีมเพียงคนเดียวควบคุมหุ่นยนต์บังคับด้วยมือ โดยจะต้องอยู่นอกสนามตลอดเวลาขณะบังคับหุ่นยนต์ จะเข้าในสนามได้ในช่วงเวลาที่ขอ Retry เท่านั้น
6) พลังงานที่ใช้จะต้องเป็นแบตเตอร์รี่ และมีแรงดันไฟ ไม่เกิน 24-25 โวลต์
7) พลังงานลมหรือระบบนิวเมติกที่ใช้นั้น จะต้องไม่เกิน 6 บาร์
4.2 หุ่นยนต์อัตโนมัติ
1) ก่อนเริ่มการแข่งขันหุ่นยนต์อัตโนมัติจะต้องมีขนาดไม่เกินความกว้าง 30 cm. ความยาว 30 cm. และความสูง 30 cm.
2) หุ่นยนต์อัตโนมัติจะต้องทำงานเองโดยไม่มีการควบคุมใดๆ จากผู้แข่งขัน
3) ไม่อนุญาตให้สมาชิกในทีมสัมผัสหุ่นยนต์ในขณะหุ่นยนต์อัตโนมัติเริ่มต้นทำงาน
4) หลังจากการแข่งขันเริ่มขึ้นหุ่นยนต์อัตโนมัติสามารถเปลี่ยนแปลงขนาดและรูปร่างได้ แต่จะต้องมีเส้นผ่าศูนย์กลางไม่เกิน 60 cm. เมื่อตรวจสอบจากด้านบน และไม่มีการแยกตัว
5) หุ่นยนต์จะต้องมีน้ำหนักไม่เกิน 3 กิโลกรัม
6) พลังงานที่ใช้จะต้องเป็นแบตเตอร์รี่ และมีแรงดันไฟ ไม่เกิน 24-25 โวลต์
7) พลังงานลมหรือระบบนิวเมติกที่ให้นั้น แรงดันลมจะต้องไม่เกิน 6 บาร์
8) ในการแข่งขันนั้นอนุญาตให้มีการแก้ไขโปรแกรมได้แต่จะต้องนำหุ่นยนต์ออกมาจากสนา
5. ชิ้นงาน
ในการแข่งขันแต่ละฝ่ายจะมีชิ้นงานทั้งหมด 13 ชิ้นงาน โดยแบ่งออกเป็นชิ้นงานทั่วไป 12 ชิ้น (เป็นวัตถุทรงสูงแบบสี่เหลี่ยมด้านเท่า ยาวด้านละ 5 cm. สูง 5 cm. แบบสามเหลี่ยมด้านเท่า ยาวด้านละ 5 cm. สูง 5 cm. และแบบทรงกระบอก เส้นผ่านศูนย์กลาง 5 cm. สูง 5 cm.) โดยสีของชิ้นงานจะเป็นสีเดียวกับสีของฝั่งผู้เล่น (สีเขียวในกรณีอยู่ฝั่งสีเขียว หรือ สีน้ำเงินในกรณีที่อยู่ฝั่งสีน้ำเงิน) และชิ้นงานบิงโก 1 ชิ้น (เป็นวัตถุทรงสูงแบบแบบหกเหลี่ยมด้านเท่า ยาวด้านละ 2.5 cm. สูง 5 cm.) โดยสีของชิ้นงานบิงโกจะเป็นสีม่วงเหมือนกันทั้งสองฝั่ง โดยลักษณะชิ้นงานมีรายละเอียดดังรูปที่ 7
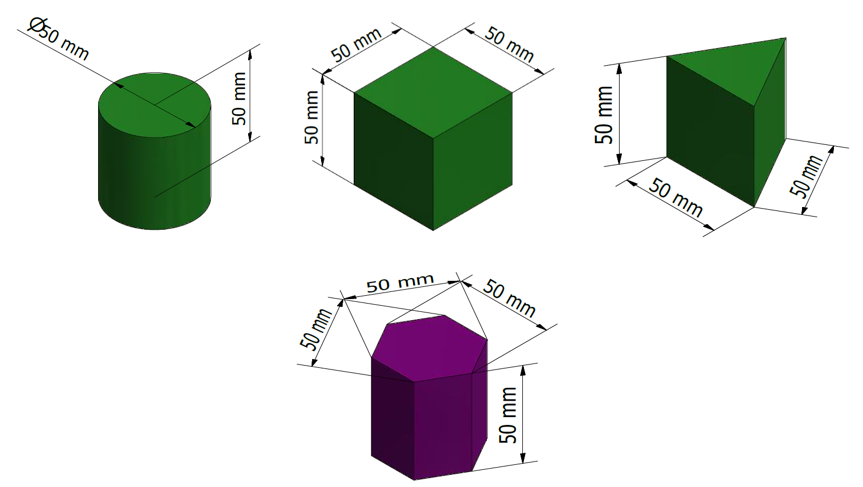
รูปที่ 7 ขนาดและลักษณะชิ้นงาน
5.1 ชิ้นงานทั่วไป
ชิ้นงานทั่วไปแบ่งออกได้ 3 รูปแบบ คือ เป็นรูปทรงแบบสี่เหลี่ยม 4 ชิ้น รูปทรงแบบทรงกระบอก 4 ชิ้น รูปทรงแบบสามเหลี่ยม 4 ชิ้น โดยมีขนาดแสดงดังในรูปที่ 7 ในตอนเริ่มต้นชิ้นงานทั้งหมดจะถูกนำไปวางในพื้นที่คลังสินค้าของหุ่นยนต์บังคับด้วยมือตามตำแหน่งที่ถูกกำหนดไว้แสดงดังรูป 3 โดยชิ้นงานรูปแบบเดียวกันจะถูกจัดเก็บในคลังสินค้าเดียวกัน
5.2 ชิ้นงานบิงโก
ชิ้นงานบิงโกจะมีลักษณะเป็นรูปทรงแบบหกเหลี่ยมจำนวน 1 ชิ้น โดยมีขนาดแสดงดังในรูปที่ 7 ในตอนเริ่มต้นชิ้นงานบิงโกจะถูกนำไปวางในพื้นที่หุ่นยนต์อัตโนมัติ อยู่บนแท่นสี่เหลี่ยมจัตุรัสทรงสูงสีเดียวกับสีของฝั่งผู้เล่น (สีเขียวในกรณีอยู่ฝั่งสีเขียว หรือ สีน้ำเงินในกรณีที่อยู่ฝั่งสีน้ำเงิน) แสดงตำแหน่งดังรูปที่ 6
หมายเหตุ ชิ้นงานทุกชิ้นทำมาจากการปริ้นขึ้นรูปโดยเครื่องปริ้นสามมิติ ที่มีความหนาแน่น 20 เปอร์เซ็นต์
6. วิธีการแข่งขันและเกณฑ์การตัดสิน
6.1 วิธีการแข่งขัน
6.1.1 ผู้เข้าร่วมการแข่งขันจำนวน 3 คนเข้าประจำตำแหน่งที่กรรมการกำหนดให้
6.1.2 ผู้เข้าร่วมการแข่งขันทีมใดมีข้อซักถาม ให้ดำเนินการสอบถามก่อนการแข่งขันเท่านั้น
6.1.3 เมื่อคณะกรรมการให้สัญญาณเริ่มการแข่งขัน ให้หุ่นยนต์ทำภารกิจตามเงื่อนไขและระยะเวลาที่กำหนดให้
6.1.4 คณะกรรมการจะพิจารณาให้คะแนนตามเกณฑ์และกติกาที่กำหนดไว้
6.1.5 ผู้เข้าแข่งขันทีมใดที่กรรมการตรวจสอบความถูกต้องและให้คะแนนแล้วให้ออกจากสนามการแข่งขันได้
6.1.6 การตัดสินของกรรมการถือว่าเป็นที่สิ้นสุด
6.2 เกณฑ์การให้คะแนน
6.2.1 หุ่นยนต์บังคับด้วยมือนำชิ้นงานไปวางในจุดส่งชิ้นงานแต่ละแบบ จะได้คะแนนตามสีดังนี้
- ชิ้นงานแบบสี่เหลี่ยม จะได้รับคะแนน 5 คะแนน/ชิ้น
- ชิ้นงานแบบสามเหลี่ยม จะได้รับคะแนน 10 คะแนน/ชิ้น
- ชิ้นงานแบบทรงกระบอก จะได้รับคะแนน 15 คะแนน/ชิ้น
6.2.2 หุ่นยนต์อัตโนมัติสามารถนำชิ้นงานไปวางยังจุดวางชิ้นงานและชิ้นงานไม่ตกจากจุดวางชิ้นงานจะได้คะแนนตามตำแหน่งดังนี้
- ชิ้นงานแบบสี่เหลี่ยม จะได้รับคะแนน 5 คะแนน/ชิ้น
- ชิ้นงานแบบสามเหลี่ยม จะได้รับคะแนน 10 คะแนน/ชิ้น
- ชิ้นงานแบบทรงกระบอก จะได้รับคะแนน 15 คะแนน/ชิ้น
- นำชิ้นงานแบบหกเหลี่ยมไปวางในจุดบิงโก จะได้รับคะแนน 60 คะแนน
โดยคะแนนรวมสูงสุดที่แต่ละทีมสามารถทำได้จะมีค่าเท่ากับ 300 คะแนน ซึ่งเป็นการวางได้ครบทุกชิ้นงาน และสามารถทำบิงโกได้
7. ข้อกำหนดในการแข่งขัน
7.1 การขอ Retry
การขอ Retry คือ เหตุการณ์ที่ผู้ควบคุมหุ่นยนต์ร้องขอรีไทร์ เพื่อนำหุ่นยนต์กลับมาในจุดเริ่มงานของหุ่นยนต์ตัวนั้น
1) ผู้ควบคุมหุ่นยนต์จะต้องยกแขนข้างใดข้างหนึ่งขึ้น และพูดคำว่า “ขอ Retry”
2) เมื่อขอ Retry แล้ว จะต้องรีบนำหุ่นยนต์ออกจากพื้นที่สนาม เพื่อนำหุ่นยนต์กลับมาพื้นที่เพื่อแก้ไขและทำการปล่อยหุ่นยนต์เข้าสู่สนามโดยเร็วที่สุด
3) ผู้ควบคุมหุ่นยนต์สามารถเข้าในสนาม เพื่อนำหุ่นยนต์ออกจากสนามได้เพียงทีมละหนึ่งคนเท่านั้น
7.2 การบังคับ Retry
การบังคับ Retry คือ เหตุการณ์ที่กรรมการตัดสินเห็นสมควรให้ผู้ควบคุมหุ่นยนต์ต้องรีไทร์ โดยเมื่อผู้เข้าแข่งขันโดนบังคับ Retry ผู้เข้าแข่งขันจะต้องนำหุ่นยนต์กลับมาวางในจุดเริ่มงานของหุ่นยนต์ตัวนั้น และปล่อยหุ่นยนต์อีกครั้งเมื่อพร้อม แล้วกรรมการให้สัญญาณปล่อยตัว โดยการบังคับ Retry จะเกิดขึ้นเมื่อมีเหตุการณ์ดังนี้
1) หุ่นยนต์ล้ำเข้าไปในแดนฝ่ายตรงข้าม
2) หุ่นยนต์ออกนอกสนาม หรือหุ่นยนต์สัมผัสกับหุ่นยนต์ฝ่ายตรงข้าม
4) หุ่นยนต์ชนชิ้นงานออกจากคลังสินค้า จุดส่งชิ้นงานและจุดวางชิ้นงาน
5) หุ่นยนต์บังคับด้วยมือล้ำเข้าไปในพื้นที่หุ่นยนต์อัตโนมัติ โดยมีการสัมผัสพื้นสนาม
6) หุ่นยนต์หยิบชิ้นงานไม่สำเร็จ (ชิ้นงานออกนอกจุดส่งชิ้นงานหรือทำชิ้นงานตกหล่นในสนาม)
7) กรณีที่หุ่นยนต์อัตโนมัติทำชิ้นงานสัมผัสกับพื้นสนามจะถูกบัง Retry และชิ้นงานจะถูกนำกลับไปวางยังจุดส่งชิ้นงาน การวางจะวางโดยกรรมการสนามโดยวางในตำแหน่งที่ทำสัญลักษณ์ไว้
8) กรณีที่หุ่นยนต์บังคับด้วยมือทำชิ้นงานสัมผัสกับพื้นสนามจะถูกบังคับรีไทร์และชิ้นงานจะถูกนำกลับไปวางยังคลังสินค้าตามประเภทของชิ้นงานนั้น โดยกรรมการสนามจะนำไปวางในตำแหน่งที่ทำสัญลักษณ์ไว้
9) กรณีที่มีการชนกันของหุ่นยนต์ของแต่ละทีม ทั้งสองทีมจะถูกบังคับรีไทร์
10) หุ่นยนต์อัตโนมัติเข้าไปในพื้นที่หุ่นยนต์บังคับด้วยมือ ในบริเวณอื่นๆ นอกจากพื้นที่จะส่งต่อชิ้นงาน
หมายเหตุ ทั้งการขอ Retry และการบังคับ Retry ของหุ่นยนต์ในฝั่งของหุ่นยนต์บังคับด้วยมือ และหุ่นยนต์ฝั่งอัตโนมัติจะเป็นอิสระต่อกัน นั่นคือหากหุ่นยนต์ตัวใดตัวหนึ่งขอ Retry หุ่นยนต์อีกก็ยังสามารถทำภารกิจต่อไปได้ โดยการขอ Retry และการบังคับ Retry ทุกครั้ง หุ่นยนต์ที่ขอ Retry จะต้องถูกนำไปวางที่จุดเริ่มต้นเสมอ
8. เวลาที่ใช้ในการแข่งขัน
8.1 ก่อนเริ่มการแข่งขันแต่ละทีมมีเวลาจัดเตรียมหุ่นยนต์ลงสนามแข่งขันเป็นเวลา 1 นาทีหลังจากได้รับสัญญาณแจ้งเตือน
8.2 ในแต่ละรอบการแข่งขันจะใช้เวลา 3 นาที
9. เกณฑ์การตัดสินแพ้ชนะ
9.1 ทีมที่สามารถทำบิงโกได้จะเป็นฝ่ายชนะ
9.2 ถ้าหากว่าไม่มีทีมใดสามารถทำบิงโกได้จะตัดสินจากคะแนนที่สามารถทำได้ “โดยทีมที่ทำคะแนนได้มากที่สุดเป็นฝ่ายชนะ”
9.3 ถ้าหากเกณฑ์การตัดสินในข้อ 9.1 และ 9.2 ยังไม่สามารถตัดสินผู้ชนะได้ จะตัดสินผู้ชนะจากทีมที่หุ่นยนต์อัตโนมัติสามารถวางชิ้นงานได้ก่อน (ทีมที่สามารถทำคะแนนจากการวางชิ้นงานแรกในฝั่งของหุ่นยนต์อัตโนมัติได้ก่อนจะเป็นฝ่ายชนะ) แต่ถ้าหากหุ่นยนต์อัตโนมัติของทั้งสองทีมไม่สามารถทำคะแนนได้ จะตัดสินผู้ชนะจากทีมความสามารถในการทำคะแนนแรกของหุ่นยนต์บังคับด้วยมือ โดยทีมที่หุ่นยนต์บังคับด้วยมือสามารถวางชิ้นงานแรกได้ก่อนจะเป็นผู้ชนะ
9.4 ในกรณีที่ไม่มีทีมใดสามารถทำคะแนนได้ (เสมอกัน 0 ต่อ 0 คะแนน) จะถือว่าเกมนั้นไม่มีผู้ชนะ
10. เกณฑ์ตัดสินการเข้ารอบ ในรอบแบ่งกลุ่ม*
10.1 ทีมที่ชนะมากที่สุดในแต่ละกลุ่มจะได้ผ่านเข้ารอบต่อไป**
10.2 ถ้าหากมีจำนวนครั้งการชนะเท่ากัน ทีมที่สามารถทำบิงโกได้จำนวนครั้งมากกว่าจะผ่านเข้ารอบ
10.3 หากว่าการตัดสินในข้อ 10.1 และ 10.2 ยังไม่สามารถตัดสินได้ จะทำการนับคะแนนรวมที่สามารถทำได้ทั้งหมดในรอบแบ่งกลุ่ม โดยทีมที่มีคะแนนมากว่าจะผ่านเข้ารอบ
10.4 หากว่าเกณฑ์ข้างต้นยังไม่สามารถตัดสินได้ จะตัดสินการเข้ารอบจากการพิจารณาจากดุลยพินิจของคณะกรรมการอีกครั้ง ซึ่งอาจจะต้องทำการแข่งของทีมที่มีคะแนนเท่ากันเพื่อหาผู้เข้ารอบต่อไป
หมายหตุ * เกณฑ์ตัดสินการเข้ารอบการแบ่งกลุ่มอาจจะมีการเปลี่ยนแปลง เนื่องจากจำนวนทีมที่เข้าร่วมการแข่งขัน ซึ่งหากมีการเปลี่ยนแปลงทางผู้จัดการแข่งขันจะแจ้งให้ทราบอึกครั้งในวันแถลงกติกา
** จำนวนทีมที่ผ่านเข้ารอบในแต่ละกลุ่ม ผู้จัดการแข่งขันจะแจ้งให้ทราบอีกครั้งในวันแถลงกติกา
11. การปรับแพ้
11.1 หุ่นยนต์ทำลายสนาม
11.2 หุ่นยนต์ทำลายเกมการแข่งขันจนไม่สามารถแข่งขันต่อได้
11.3 ผู้เข้าแข่งขันแสดงถึงกิริยาที่ไม่เหมาะสม